The robot had to be designed to fit in a 11 x 11 x 11" cube, draw no more than 12V, and use only ABS plastic, metal, and purchased parts. We came up with several concepts and mixed and matched them, using a weighted voting system to choose our final concept:

After selecting a spring loaded solenoid as our launching mechanism, I created a Solidworks model for fabrication:

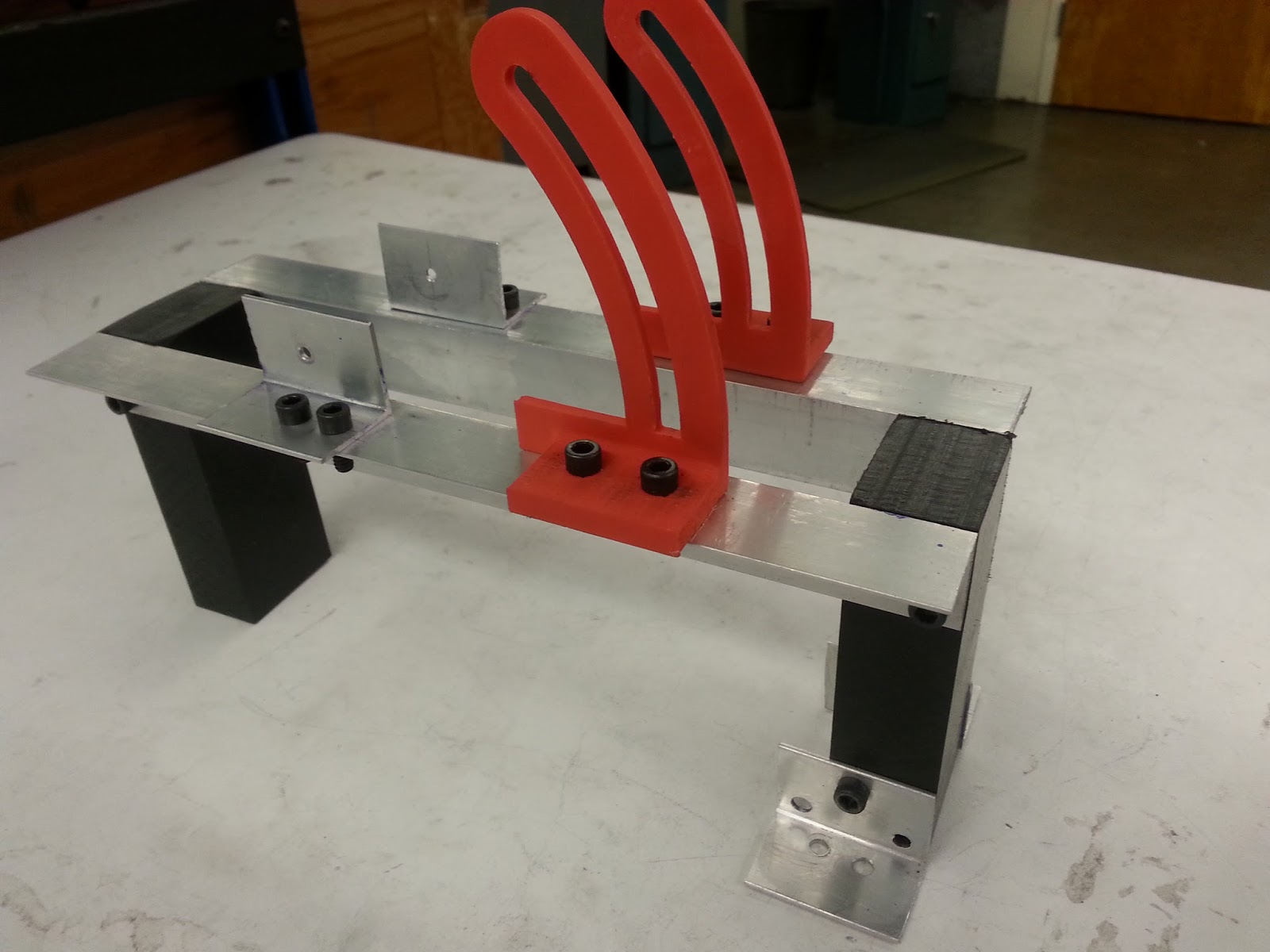
Before cutting metal, we wanted to test the performance capability of the used solenoid we selected, so I made a prototype:

After verifying the solenoid was powerful enough to launch balls into the target bin, I manufactured the final launcher with mills, lathes, bandsaws, and a 3D printer:
Our final CAD featured rear wheel drive, two side-mounted ultrasonic sensors for navigation, and our solenoid launcher with an adjustable launch angle:

Thanks to a straightforward CAD model, manufacturing the actual robot was easier than we expected:

It was very rewarding seeing the culmination of my undergraduate experience at play in such an in depth, cross functional project. It was also satisfying to see it hold its own in competition!

Video May 31, 12 03 33 AM from Alexander Phinney on Vimeo.




{kind=link}